trace.py¶
Module to trace topographic streamline trajectories and compute their density grids.
- Imports the following:
-
class
streamlines.trace.Trace(state, imported_parameters, geodata, preprocess)¶ Class providing set of methods to compute topographic streamline trajectories and their density grids. Specifically, to:
- set seed points aka start locations (sub-pixel positions) of streamlines;
- trace streamlines from seed points both upstream amd downstream;
- compute gridded measures of mean streamline length and mean effective area.
-
__init__(state, imported_parameters, geodata, preprocess)¶ Parameters: - state (obj) –
- imported_parameters (dict) –
- geodata (obj) –
- preprocess (obj) –
Initialize a Trace class instance.
-
self.geodata¶ Type: obj
-
self.preprocess¶ Type: obj
-
self.seed_point_array¶ Type: numpy.ndarray
-
self.perform_RungeKutta2_integration¶ Type: function
-
compute_fields()¶ Trace up or downstreamlines across region of interest (ROI) of DTM grid.
-
compute_trajectories()¶ Trace up or downstreamlines across region of interest (ROI) of DTM grid.
-
do()¶ Trace all streamlines both upstream and downstream and derive mean streamline point spacing.
-
seed_point_array¶ Type: numpy.ndarray
-
traj_nsteps_array¶ Type: numpy.ndarray
-
traj_length_array¶ Type: numpy.ndarray
-
traj_stats_df¶ Type: pandas.DataFrame
-
slc_array¶ Type: numpy.ndarray
-
slt_array¶ Type: numpy.ndarray
-
sla_array¶ Type: numpy.ndarray
-
Code¶
"""
---------------------------------------------------------------------
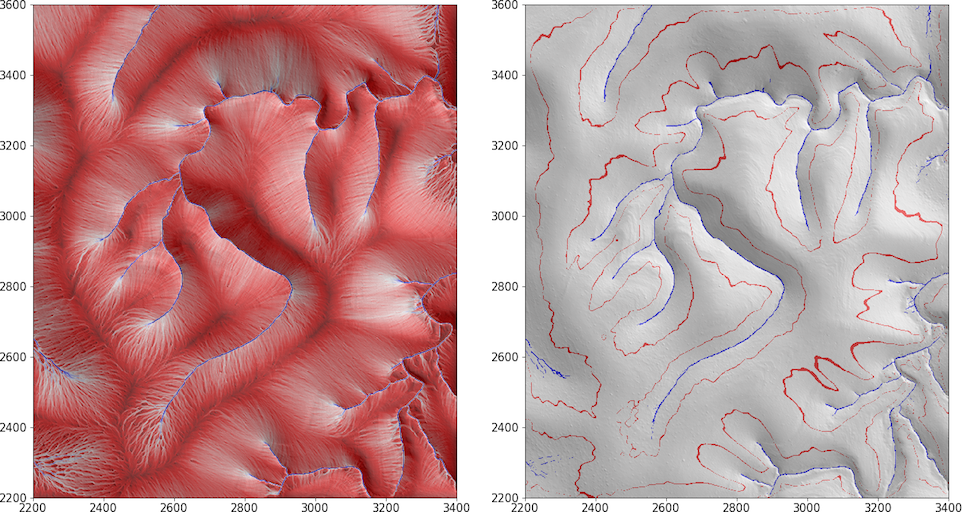
Module to trace topographic streamline trajectories and compute their density grids.
.. image:: ../images/Guadalupe_example1.png
---------------------------------------------------------------------
Imports the following:
- :class:`.Core` class
- :class:`.Trajectories` class
- :class:`.Fields` class
- :class:`.Data` and :class:`.Info` classes, as well as functions,
from the :mod:`.useful` module
---------------------------------------------------------------------
.. _pandas: https://pandas.pydata.org/
"""
import sys
import numpy as np
from os import environ
environ['PYTHONUNBUFFERED']='True'
from streamlines.core import Core
from streamlines.trajectories import Trajectories
from streamlines.fields import Fields
from streamlines.useful import Data, Info, get_bbox
__all__ = ['Trace']
pdebug = print
class Trace(Core):
"""
Class providing set of methods to compute topographic streamline trajectories and
their density grids. Specifically, to:
#. set seed points aka start locations (sub-pixel positions) of streamlines;
#. trace streamlines from seed points both upstream amd downstream;
#. compute gridded measures of mean streamline length and mean effective area.
"""
def __init__(self,state,imported_parameters,geodata,preprocess):
"""
Args:
state (obj):
imported_parameters (dict):
geodata (obj):
preprocess (obj):
Initialize a Trace class instance.
Attributes:
self.geodata (obj):
self.preprocess (obj):
self.seed_point_array (numpy.ndarray):
self.perform_RungeKutta2_integration (function):
"""
super(Trace,self).__init__(state,imported_parameters)
self.geodata = geodata
self.preprocess = preprocess
self.mapping_array = None
self.seed_point_array = None
def do(self):
"""
Trace all streamlines both upstream and downstream
and derive mean streamline point spacing.
Attributes:
seed_point_array (numpy.ndarray):
streamline_arrays_list (list):
traj_nsteps_array (numpy.ndarray):
traj_length_array (numpy.ndarray):
traj_stats_df (pandas.DataFrame):
slc_array (numpy.ndarray):
slt_array (numpy.ndarray):
sla_array (numpy.ndarray):
"""
self.print('\n**Trace begin**')
# Integrate streamlines downstream and upstream
self.compute_trajectories()
# Map mean streamline integrations downstream and upstream
self.compute_fields()
# Done
self.print('**Trace end**\n')
def compute_trajectories(self):
"""
Trace up or downstreamlines across region of interest (ROI) of DTM grid.
"""
mask_array = self.state.merge_active_masks()
bbox, bnx, bny = get_bbox(~mask_array)
pad = self.geodata.pad_width
nxp = self.geodata.roi_nx+pad*2
nyp = self.geodata.roi_ny+pad*2
mapping_array = np.zeros((nxp,nyp),dtype=np.uint32)
info = Info(self.state, self, self.geodata.roi_pixel_size)
info.set_xy(bnx,bny, pad)
data = Data( info=info, bbox=bbox, pad=pad,
mapping_array = mapping_array,
mask_array = mask_array,
uv_array = self.preprocess.uv_array
)
trajectories = Trajectories( self.state.cl_platform, self.state.cl_device,
cl_src_path = self.state.cl_src_path,
info = info,
data = data,
do_trace_downstream = self.do_trace_downstream,
do_trace_upstream = self.do_trace_upstream,
verbose = self.state.verbose,
gpu_verbose = self.state.gpu_verbose
)
trajectories.integrate()
# Only preserve what we need from the trajectories class instance
offset_xy = np.array((bbox[0]-pad,bbox[2]-pad))
self.seed_point_array = trajectories.data.seed_point_array+offset_xy
self.streamline_arrays_list = trajectories.data.streamline_arrays_list
self.traj_stats_df = trajectories.data.traj_stats_df
def compute_fields(self):
"""
Trace up or downstreamlines across region of interest (ROI) of DTM grid.
"""
mask_array = self.state.merge_active_masks()
bbox, bnx, bny = get_bbox(~mask_array)
pad = self.geodata.pad_width
nxp = self.geodata.roi_nx+pad*2
nyp = self.geodata.roi_ny+pad*2
mapping_array = np.zeros((nxp,nyp),dtype=np.uint32)
info = Info(self.state, self, self.geodata.roi_pixel_size)
info.set_xy(bnx,bny, pad)
data = Data( info=info, bbox=bbox, pad=pad,
mask_array = mask_array,
uv_array = self.preprocess.uv_array,
mapping_array = mapping_array,
traj_stats_df = self.traj_stats_df
)
fields = Fields( self.state.cl_platform, self.state.cl_device,
cl_src_path = self.state.cl_src_path,
info = info,
data = data,
verbose = self.state.verbose,
gpu_verbose = self.state.gpu_verbose
)
fields.integrate()
# Only preserve what we need from the trajectories class instance
self.slc_array = np.zeros((nxp,nyp,2), dtype=np.uint32)
self.slt_array = np.zeros((nxp,nyp,2), dtype=np.float32)
self.sla_array = np.zeros((nxp,nyp,2), dtype=np.float32)
# Insert results back into full (padded) DTM ROI grid arrays
bounds = data.bounds_slx
self.slc_array[bounds] = fields.data.slc_array
self.slt_array[bounds] = fields.data.slt_array
self.sla_array[bounds] = fields.data.sla_array
